
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Taking Measure
Just a Standard Blog
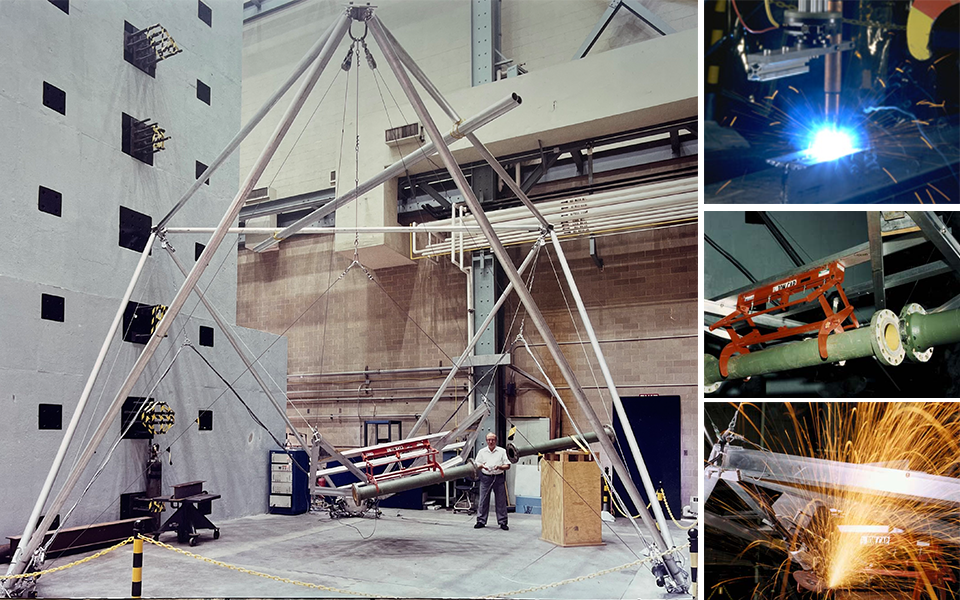
(Left) A younger me in the 1990s holding my 6-degrees of freedom joystick, which I had programmed to manually control the moving platform of the Spider version of our experimental prototype RoboCrane. The joystick was connected to my controller, barely visible on the right side of the reaction wall. (Right) The RoboCrane performing various operations including welding, joining pipes and grinding steel.
The RoboCrane — now hard at work at the Chernobyl and Fukushima nuclear cleanup sites — is a good example of a successfully commercialized technology invented at the National Institute of Standards and Technology (NIST). I’ll try to tell that story in this blog.
In the early 1980s, the manufacturing of industrial robots was dominated by a few dozen U.S. companies eager to expand into new applications with new innovative robot designs. One application that had not yet been explored was that of robotic cranes that could move and position industrial robots or tools in novel ways to achieve a variety of new tasks. The main reason was that single-point suspended cranes have very low resistance to swing and low resistance to twist about a vertical vector axis. This is a serious limitation because most industrial robots require a stable base for their operation. Some manufacturers resorted to the use of rigid telescoping masts, which are heavy and have limited reach and payload capability. To address this problem in the mid-1980s, the late James Albus, a prolific visionary and longtime chief of my division, invented what was later called the NIST RoboCrane.
The RoboCrane is a system of six cables suspending a platform by three points, giving the platform the motion capabilities of the human forearm and wrist. I worked out the mathematical models that would supply the correct amount of tension to the cables to hold the platform steadily in place and move it around its six degrees of freedom (rotation and translation about its various axes). Industrial robots or tools, such as those that grab, saw, hammer or weld, can be mounted to the RoboCrane moving platform where they act like fingers, with each interchangeable robot “digit” capable of performing different tasks in otherwise difficult or dangerous-to-reach places, such as airplane fuselage inspection and painting, and nuclear power plant fuel rod installation and removal.
The staff in my division built a functioning experimental prototype of a freestanding RoboCrane sometime around 1990. We called it the Spider because of its shape. An interesting feature of the Spider crane was that its supporting legs could be folded inward, so the whole crane formed a flat package for easy transport and reassembly. I developed a sophisticated controller for this prototype, which made possible the demonstration of several manufacturing capabilities of the Spider. We showed tools mounted to the Spider moving platform being used to weld steel beams, grind or saw large steel or wood beams, mount large steel I-beams, fit pipes, and grab and manipulate large barrels.
Collaboration with a metal bridge manufacturer demonstrated that the Spider could successfully manipulate and join long, heavy bridge modules. This led to proposals for alternative designs of the RoboCrane’s wire ropes so that they could also handle long bridge segments, ship cargo containers and shipbuilding materials. The fact that the Spider version of the RoboCrane is comparably light for the weight of the payloads it can lift and its portability has led to several concept designs and proposals for space applications, such as building habitats on other planets (such as Mars) and satellites (such as the Moon), collections of soil samples, and more.
The technology transfer breakthrough came in the late 1990s during my participation in a Robotic Industries Association committee for writing industrial robot safety standards. During one of the committee meetings, I gave an informal presentation of our RoboCrane technology work and its potential as an industrial tool with a large variety of applications. One member of this committee was a representative of PaR Systems Inc., of the Greater Minneapolis-St. Paul area. He expressed his interest in this technology, and I invited him to the NIST RoboCrane lab to see our functioning model of the Spider. I demonstrated to him my controller and a variety of applications that I had programmed for the RoboCrane controller.
A while later we arranged to bring a group of his technical people to see the RoboCrane demos. Soon after this meeting they invited me to visit their plant in Minnesota to give a talk to the whole technical staff regarding the RoboCrane technology and my controller. In the early 2000s, I learned that PaR Systems had signed a cooperative agreement with NIST for the transfer of the RoboCrane technology to them. Later they told me that they had built a functioning prototype of the RoboCrane, which they called TensileTruss, and that it was working well.
Unexpected Applications
In April 1986, the Chernobyl nuclear power plant exploded and began showering the surrounding area and most of Europe with radioactive debris. The Soviet government was able to contain the disaster with a giant concrete and steel sarcophagus, but after the break-up of the Soviet Union in 1991, Ukraine, where Chernobyl is located, inherited the nuclear contamination problem. Ukraine could do very little to remediate the disaster site because of lack of funds. In 1997, the G7 countries, the European Commission and Ukraine began to raise the estimated 2.1 billion euros (approximately $3.6 billion now) necessary to fund a program to cover the Chernobyl disaster site with a secure containment structure and do cleanup. That structure was to last 100 years, and within that period workers would dismantle the remnants of the nuclear reactor and securely bury the toxic parts.
I learned that they were looking for special cranes that could accomplish the dismantling operation and survive 100 years of extremely high levels of nuclear radiation. Later I learned that PaR would be constructing three of their cranes designed to dismantle the damaged nuclear reactor. These cranes can be seen in the last segment of a Discovery Channel documentary called Impossible Engineering: Chernobyl’s Toughest Fix. That was a very gratifying experience for me.
I ran into my associate from PaR Systems at a meeting at NIST in 2013, and he told me their system was being considered for the decommissioning operations and spent fuel recovery at the Fukushima Daiichi Nuclear Power Plant in Japan, where four nuclear reactors were heavily damaged by a 2011 earthquake and tsunami. This system will deploy interchangeable tools such as underwater hydraulic manipulators, hydraulic shears and crushers, grippers, and fuel grapples. This system is described in World Nuclear News (Jan. 18, 2016), which shows the crane fitted with a remotely operated system supplied by Toshiba, equipped with tools necessary for the removal of the debris and fuel assemblies of the destroyed plant. The World Nuclear News (March 1, 2021) also reported that the removal of unit 3 of the Fukushima Daiichi storage fuel pools was completed in March 2021. The experience gained from that operation will be used for the fuel removal from units 1 and 2. What an interesting journey for the RoboCrane, from our 1980s NIST laboratory to a 2021 Japanese nuclear power plant disaster site!
So, how do you facilitate the commercialization of such a technically sophisticated invention? Here are some of my suggestions:
- If you believe in the usefulness of what you have invented, work hard with persistence and perseverance. It could take 10 to 15 years or more before something develops.
- You should publish anytime there is something new with the design or performance of the invention.
- You should give conference and group presentations, especially to groups from target industries, and participate in relevant subject expos.
- Be sure to invite interested parties for lab tours and relevant application demonstrations.
- Make sure you work with technology transfer officials for the signing of proper technology transfer agreements.
* The author would like to thank the following (past and present) NIST researchers who contributed to the success of the RoboCrane: Roger Bostelman, Adam Jacoff, Kamel Saidi, Bob Bunch, Bob Russell, Fred Proctor, Will Shackleford, Chuck Giauque, Ann Virts, Ed Amatucci, Tom Wheatley and Rick Norcross, as well as several students and other contributors.
About the author

Related posts



Comments
Thank you, Professor May, for your nice comment.
It is great to see the advancements made within the industrial sector. For example this crane. Thanks for sharing this great piece.